













What is Pedestrian Dead Reckoning (PDR)?
Ever find yourself walking along a street, following your phone’s GPS, when suddenly it doesn’t know where you are anymore? Maybe you’re near a section of skyscrapers in the city or walking a less traveled trail through the woods. Either way, your GPS signal is being occluded by the environment. Pedestrian dead reckoning is a technology that helps in those moments.
Going backwards – both conceptually and temporally – in one of my previous posts we defined dead reckoning as the process of calculating a position estimate from a known starting location and internal estimates of speed and heading direction over time without any external references. Pedestrian dead reckoning is that same idea extended for human motion, specifically while walking or running.
How does Pedestrian Dead Reckoning work?
Pedestrian dead reckoning uses inertial sensing (accelerometers, gyroscopes, sometimes magnetometers) to estimate speed and heading. The basic model for walking includes steps taken, stride length, and direction. If you know the stride length and how many steps taken, you can infer distance. Add in direction, and you have a complete dead reckoning output.
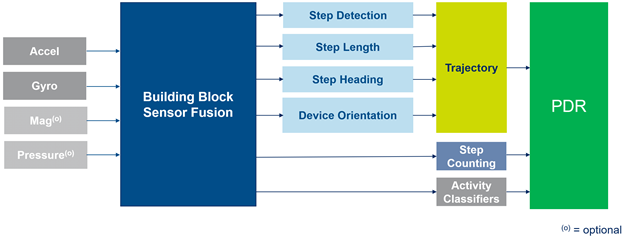
By fusing the multiple sensor outputs, a PDR / Pedestrian Dead Reckoning algorithm can calculate fundamental building blocks. This includes things like step detection, stride length, step heading, and device orientation (are you holding your phone in your hand, or is it in your pocket?). These building blocks can be fused together to determine general trajectory. Combined with other outputs for step counting and activity classification (are you walking, running, or still?), you can understand how far you’ve moved.
What are PDR limitations and the solution
Knowing where you are when GPS is unreliable is one of the main benefits of pedestrian dead reckoning. And since it’s based on inertial sensing, it’s not reliant on an external measurement source (like satellites). But if PDR is so great, why even bother with GPS?
Well, PDR has its own limitations. Being independent from external sources is a double edged sword. It means it can’t lose track, but also that it cannot correct itself. It can make estimates (that’s the ‘reckon’ part of dead reckoning). With GPS, positioning can be corrected over time when it has a clear signal.
An IMU’s gyroscope’s angular position information is more reliable than the accelerometer or magnetometer for determining orientation in the short term. It outputs consistent, usable data in the short term. A magnetometer or accelerometer can also determine orientation, but requires more long term, stable measurements. Similarly, dead reckoning is useful for the short term. GPS can provide stable location measurements over a longer period of time. The main benefit is a complementing of measurement capability. A PDR algorithm serves as an integral component to a robust location solution.
Real Time Location Systems (RTLS) and additional benefits/drawbacks
Real Time Location Systems (RTLS) are another system for determining location. Where GPS is useful for the outdoors, RTLS serve a similar role for structures or otherwise contained spaces. Tracking where merchandise is in a warehouse, customers through a mall, or patients in a hospital are all situations where RTLS would be useful and GPS would not reliably reach.
The most common technologies used with real time location systems are ultra-wideband, Bluetooth, and WiFi IP. Each type of signal is different, but the basic principle remains the same. There are a number of fixed reference points of the chosen signal type. The user then carries a tag (like a small transceiver or phone) that can sends signals back and forth between these reference points to determine location.
Most RTLS work by determining signal strength relative to the tag, and with a minimum of 3 reference points, the location can be determined. However, some technologies do not require multiple reference points or anchors. Ultra-wide band can determine position with a single anchor and does not need to triangulate. Bluetooth can determine angle of arrival and angle of departure. Using more reference points will only make the system more accurate. These systems are relatively consistent and deterministic; however, they are also power heavy compared to an inertial system. This is where PDR shines yet again. If a RTLS works with PDR for a more complete solution, it can decrease the frequency it updates from its own system and rely on PDR to ‘fill in the blanks’.
The power saving is a highly relevant advantage, but PDR has additional benefits to an RTLS or GPS system. I’m going to list it again for completeness, but here’s a compilation of benefits to adding PDR to any location-based system:
- Lower power consumption: Lowering the frequency of the RTLS/GPS updates and relying on the lower power PDR algorithm instead saves power to the tag/device.
- Filling coverage gaps: If the system is unable to find the tag (due to occlusion, latency issues, range) or a device to satellites, it can use a PDR estimate to fill in for the lost data.
- Higher system accuracy: RTLS and GPS systems specialize in location, but do not track direction or speed directly. Pedestrian dead reckoning gives more advanced layers of granularity at a higher frequency than the other systems, yielding a much smoother path. GPS, for example, has an accuracy of 3m in the best of conditions.
- Lower installation costs: With a PDR solution, fewer beacons are necessary for a RTLS to function.
Remember, PDR works best as a supplement to any location-based technology, though a great one at that. It could be used on its own, but without any sort of truth signal to back it up, it would lose reliability over time. However, in short bursts, it adds a great number of benefits on top of other systems. CEVA has been working in the sensor fusion space for over 20 years, and has developed a robust PDR algorithm on top of our already precise inertial sensor fusion. Contact us to learn more about our algorithm and see a demo.
You might also like



More from Connectivity

5G Based LEO satellites will Truly Grow IoT Adoption Worldwide
When most of us think about widespread technology adoption we have a pronounced urban bias. Tech growth pitches around 5G …

Wi-Fi 7 (IEEE 802.11be) & MLO vs. Wi-Fi 6/6E (IEEE 802.11ax): What to Ask for Optimal Design Considerations
Introduction Since the establishment of the Wi-Fi Alliance in 1999, Wi-Fi technology has consistently advanced to meet the ever-increasing demand for …

BLE Supercharges Electronic Shelf Labels for Retail
Retail stores communicate basic product information and price to browsing shoppers through shelf labels placed near each product. Commonly these …